Ubuntu (binarios)
Tabla de contenidos
Esta página explica cómo instalar ROS 2 en Ubuntu Linux desde un paquete binario precompilado.
Nota
El binario precompilado no incluye todos los paquetes ROS 2. Se incluyen todos los paquetes de la variante base de ROS y solo un subconjunto de paquetes de la variante de escritorio ROS están incluidos. La lista exacta de paquetes se describe en los repositorios enumerados en este archivo ros2.repos.
Requisitos del sistema
Solo Windows 10 está soportado.
Instalando prerequisitos
Instalar Chocolatey
Chocolatey es un administrador de paquetes para Windows, instálalo siguiendo sus instrucciones de instalación:
Usarás Chocolatey para instalar otras herramientas de desarrollo.
Instalar Python
Abre un símbolo del sistema y escriba lo siguiente para instalar Python a través de Chocolatey:
choco install -y python --version 3.8.3
Instalar redistribuibles de Visual C++
Abre un símbolo del sistema y escriba lo siguiente para instalarlos a través de Chocolatey:
choco install -y vcredist2013 vcredist140
Instalar OpenSSL
Descarga el instalador OpenSSL de Win64 OpenSSL v1.1.1n desde esta página. Desplázate hasta la parte inferior de la página y descarga Win64 OpenSSL v1.1.1n. No descargues las versiones Win32 o Light, o los instaladores v3.X.Y.
Ejecuta el instalador con los parámetros predeterminados, ya que los siguientes comandos asumen que usaste el directorio de instalación predeterminado.
Este comando establece una variable de entorno que persiste durante las sesiones:
setx /m OPENSSL_CONF "C:\Program Files\OpenSSL-Win64\bin\openssl.cfg"
Deberá agregar la carpeta bin OpenSSL-Win64 a su PATH. Puede hacerlo haciendo clic en el icono de Windows, escribiendo «Variables de entorno» y luego haciendo clic en «Editar las variables de entorno del sistema». En el cuadro de diálogo resultante, haga clic en «Variables de entorno», luego haga clic en «Path» en el panel inferior, finalmente haga clic en «Editar» y agregue la ruta a continuación.
C:\Program Files\OpenSSL-Win64\bin\
Instalar Visual Studio
Instala Visual Studio 2019.
Si ya tienes una versión de pago de Visual Studio 2019 (Professional, Enterprise), omite este paso.
Microsoft proporciona una versión gratuita de Visual Studio 2019, llamada Community, que se puede usar para crear aplicaciones que usan ROS 2. You can download the installer directly through this link.
Asegúrate de que las características de Visual C++ estén instaladas.
Una manera fácil de asegurarse de que estén instalados es seleccionar el flujo de trabajo Desarrollo de escritorio con C++ durante la instalación.
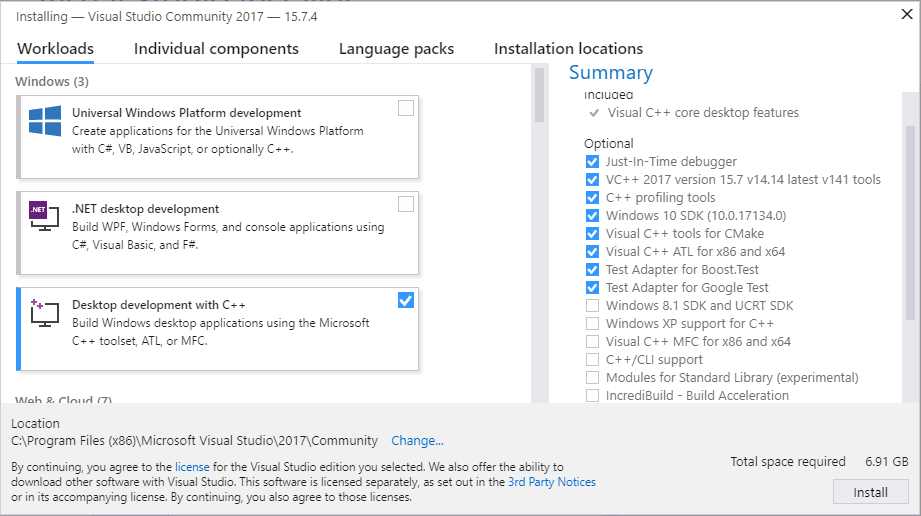
Asegúrate de que no haya instaladas herramientas de CMake de C++ deseleccionándolas en la lista de componentes que se instalarán.
Instalar OpenCV
Algunos de los ejemplos requieren la instalación de OpenCV.
Puedes descargar una versión precompilada de OpenCV 3.4.6 desde https://github.com/ros2/ros2/releases/download/opencv-archives/opencv-3.4.6-vc16.VS2019.zip .
Suponiendo que lo descomprimiste en C:\opencv, escribe lo siguiente en un símbolo del sistema (requiere privilegios de administrador):
setx /m OpenCV_DIR C:\opencv
Dado que está utilizando una versión ROS precompilada, debemos indicarle dónde encontrar las bibliotecas de OpenCV.
Tienes que extender la variable PATH a C:\opencv\x64\vc16\bin.
Instalar dependencias
Hay algunas dependencias que no están disponibles en la base de datos del paquete Chocolatey. Para facilitar el proceso de instalación manual, proporcionamos los paquetes Chocolatey necesarios.
Como algunos paquetes chocolatosos dependen de él, comenzamos instalando CMake
choco install -y cmake
Deberás agregar la carpeta bin de CMake C:\Program Files\CMake\bin a tu PATH.
Descarga estos paquetes desde este repositorio de GitHub.
asio.1.12.1.nupkg
bullet.3.17.nupkg
cunit.2.1.3.nupkg
eigen-3.3.4.nupkg
tinyxml-usestl.2.6.2.nupkg
tinyxml2.6.0.0.nupkg
Una vez que se descargan estos paquetes, abre un shell administrativo y ejecuta el siguiente comando:
choco install -y -s <PATH\TO\DOWNLOADS\> asio cunit eigen tinyxml-usestl tinyxml2 bullet
Reemplace <PATH\TO\DOWNLOADS> con la carpeta en la que descargó los paquetes.
Primero actualiza pip y setuptools:
python -m pip install -U pip setuptools==59.6.0
Ahora instala algunas dependencias de Python adicionales:
python -m pip install -U catkin_pkg cryptography empy importlib-metadata lark==1.1.1 lxml matplotlib netifaces numpy opencv-python PyQt5 pillow psutil pycairo pydot pyparsing==2.4.7 pyyaml rosdistro
Instalar Qt5
Descarga el instalador offline 5.12.X del sitio web de Qt.
Ejecuta el instalador.
Asegúrate de seleccionar el componente MSVC 2017 64-bit en el árbol Qt -> Qt 5.12.12.
Finalmente, en una ventana de administrador cmd.exe configura estas variables de entorno.
Los siguientes comandos asumen que lo instalaste en la ubicación predeterminada de C:\Qt.
setx /m Qt5_DIR C:\Qt\Qt5.12.12\5.12.12\msvc2017_64
setx /m QT_QPA_PLATFORM_PLUGIN_PATH C:\Qt\Qt5.12.12\5.12.12\msvc2017_64\plugins\platforms
Nota
Esta ruta puede cambiar según la versión de MSVC instalada, el directorio en el que se instaló Qt y la versión de Qt instalada.
Dependencias de RQt
Para ejecutar rqt_graph, debe descargar e instalar Graphviz. El instalador le preguntará si desea agregar graphviz a PATH, elige agregarlo al usuario actual o a todos los usuarios.
Instalar implementaciones de DDS adicionales (opcional)
Si desea utilizar otro proveedor de DDS o RTPS además del DDS rápido predeterminado, puede encontrar instrucciones aquí.
Descargar ROS 2
No se proporcionan versiones binarias de Humble Hawksbill. En su lugar, puede descargar versiones diarias de prerelease binarios.
Ve a la página de releases: https://github.com/ros2/ros2/releases
Descarga el paquete más reciente para Windows, por ejemplo,
ros2-humble-*-windows-release-amd64.zip.
Nota
Puede haber más de una opción de descarga binaria que podría causar que el nombre del archivo sea diferente.
Nota
Para instalar bibliotecas de depuración para ROS 2, consulta Cosas adicionales para depuración.
Luego continúa descargando ros2-package-windows-debug-AMD64.zip.
Descomprima el archivo zip en algún lugar (supondremos
C:\dev\ros2_humble).
Configuración del entorno
Inicia una shell de comandos y obtén el archivo de configuración de ROS 2 para configurar el espacio de trabajo:
call C:\dev\ros2_humble\local_setup.bat
Es normal que el comando anterior, si nada más salió mal, muestre «El sistema no puede encontrar la ruta especificada». Exactamente una vez.
Prueba algunos ejemplos
En un shell de comandos, configure el entorno ROS 2 como se describe arriba y luego ejecute un talker de C++:
ros2 run demo_nodes_cpp talker
Abre otro shell de comandos y ejecuta un listener Python:
ros2 run demo_nodes_py listener
Deberías ver al talker diciendo que está publicando (Publishing) mensajes y al listener diciendo que oye (I heard) esos mensajes.
Esto verifica que las API de C++ y Python funcionan correctamente.
¡Hurra!
Siguientes pasos después de la instalación
Continúa con los tutoriales y demostraciones para configurar su entorno, crear tu propio espacio de trabajo y paquetes, y aprender los conceptos básicos de ROS 2.
Implementaciones adicionales de RMW (opcional)
El middleware predeterminado que usa ROS 2 es Fast DDS, pero el middleware (RMW) se puede reemplazar en tiempo de ejecución.
Consulta la guía sobre cómo trabajar con múltiples RMW.
Solución de problemas
Las técnicas de resolución de problemas se pueden encontrar aquí.
Desinstalar
- Si instalaste tu espacio de trabajo con colcon como se indicó anteriormente, la «desinstalación» podría ser simplemente una cuestión de abrir una nueva terminal y no ejecutar el archivo
setupdel espacio de trabajo. De esta manera, su entorno se comportará como si no hubiera una instalación de Humble en su sistema.
- Si instalaste tu espacio de trabajo con colcon como se indicó anteriormente, la «desinstalación» podría ser simplemente una cuestión de abrir una nueva terminal y no ejecutar el archivo
Si también está intentando liberar espacio, puede eliminar todo el directorio del espacio de trabajo con:
rmdir /s /q \ros2_humble
Cosas adicionales para depuración
Para descargar las bibliotecas de depuración de ROS 2, deberás descargar ros2-humble-*-windows-debug-AMD64.zip.
Ten en cuenta que las bibliotecas de depuración requieren una configuración adicional adicional para funcionar como se indica a continuación.
La instalación de Python puede requerir modificaciones para habilitar los símbolos de depuración y los binarios de depuración:
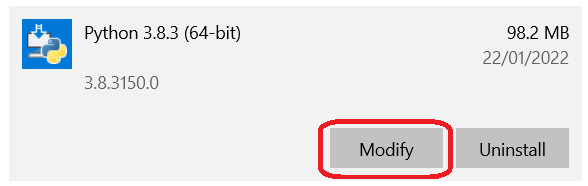
Busca en la Barra de búsqueda de Windows y abra Aplicaciones y características.
Busca la versión de Python instalada.
Haz clic en Modifica.
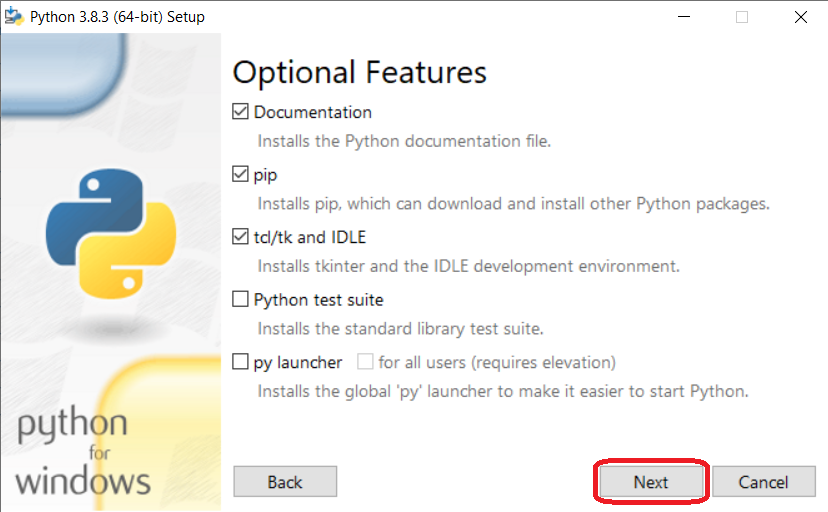
Haz clic en Siguiente para ir a Opciones avanzadas.
Asegúrate de que Descargar símbolos de depuración y Descargar archivos binarios de depuración estén marcados.
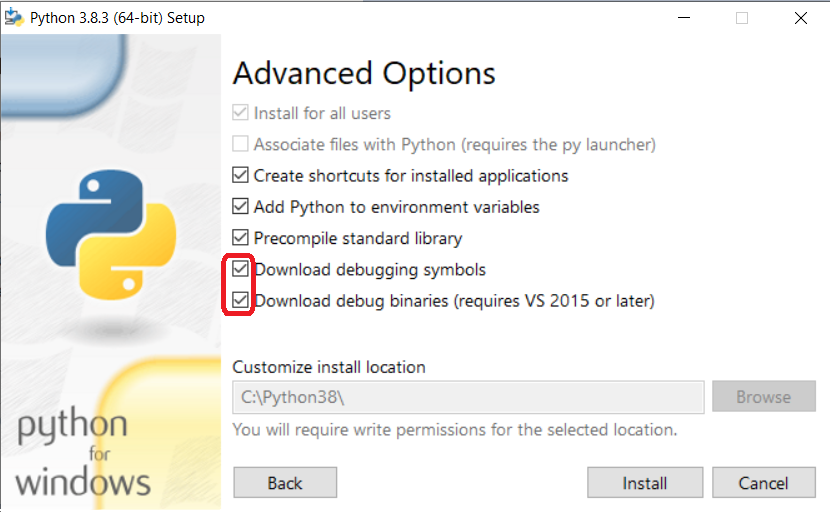
Haz clic en Instalar.
(Alternativa) Instalación de ROS 2 compilado desde aka.ms/ros
El proyecto https://aka.ms/ros aloja compilaciones de ROS 2 en las instantáneas de release. Esta sección explica cómo instalar ROS 2 desde este canal.
Instalar compilaciones de ROS 2
En un símbolo del sistema administrativo, ejecute los siguientes comandos.
mkdir c:\opt\chocolatey
set PYTHONNOUSERSITE=1
set ChocolateyInstall=c:\opt\chocolatey
choco source add -n=ros-win -s="https://aka.ms/ros/public" --priority=1
choco upgrade ros-foxy-desktop -y --execution-timeout=0
Configuración del entorno
Inicia un símbolo del sistema administrativo y ejecuta source con archivo de configuración de ROS 2 para configurar el espacio de trabajo:
call C:\opt\ros\foxy\x64\local_setup.bat
Estar al día
Para mantenerse actualizado con las últimas compilaciones, ejecute:
set ChocolateyInstall=c:\opt\chocolatey
choco upgrade all -y --execution-timeout=0
Desinstalar
Si deseas eliminar por completo el entorno descargado anteriormente, ejecuta este comando:
rmdir /s /q C:\opt\