Estás leyendo la documentación para una versión de desarrollo. Para la última versión publicada, por favor revisa Humble.
Experimentando con un robot ficticio
En esta demo, presentamos un robot de demostración simple con todos los componentes, desde la publicación de estados conjuntos hasta la publicación de datos láser falsos hasta la visualización del modelo de robot en un mapa en RViz.
Lanzamiento de la demo
Asumimos que tu directorio de instalación de ROS 2 es ~/ros2_ws. Cambia los directorios según su plataforma.
Para iniciar la demo, ejecutamos el archivo de inicio de la demo, que explicaremos con más detalle en la siguiente sección.
source ~/ros2_ws/install/setup.bash
ros2 launch dummy_robot_bringup dummy_robot_bringup_launch.py
Deberías ver algunas impresiones dentro de su terminal a lo largo de las siguientes líneas:
[INFO] [launch]: process[dummy_map_server-1]: started with pid [25812]
[INFO] [launch]: process[robot_state_publisher-2]: started with pid [25813]
[INFO] [launch]: process[dummy_joint_states-3]: started with pid [25814]
[INFO] [launch]: process[dummy_laser-4]: started with pid [25815]
Initialize urdf model from file: /home/mikael/work/ros2/bouncy_ws/install_debug_isolated/dummy_robot_bringup/share/dummy_robot_bringup/launch/single_rrbot.urdf
Parsing robot urdf xml string.
Link single_rrbot_link1 had 1 children
Link single_rrbot_link2 had 1 children
Link single_rrbot_link3 had 2 children
Link single_rrbot_camera_link had 0 children
Link single_rrbot_hokuyo_link had 0 children
got segment single_rrbot_camera_link
got segment single_rrbot_hokuyo_link
got segment single_rrbot_link1
got segment single_rrbot_link2
got segment single_rrbot_link3
got segment world
Adding fixed segment from world to single_rrbot_link1
Adding moving segment from single_rrbot_link1 to single_rrbot_link2
[INFO] [dummy_laser]: angle inc: 0.004363
[INFO] [dummy_laser]: scan size: 1081
[INFO] [dummy_laser]: scan time increment: 0.000028
Adding moving segment from single_rrbot_link2 to single_rrbot_link3
Adding fixed segment from single_rrbot_link3 to single_rrbot_camera_link
Adding fixed segment from single_rrbot_link3 to single_rrbot_hokuyo_link
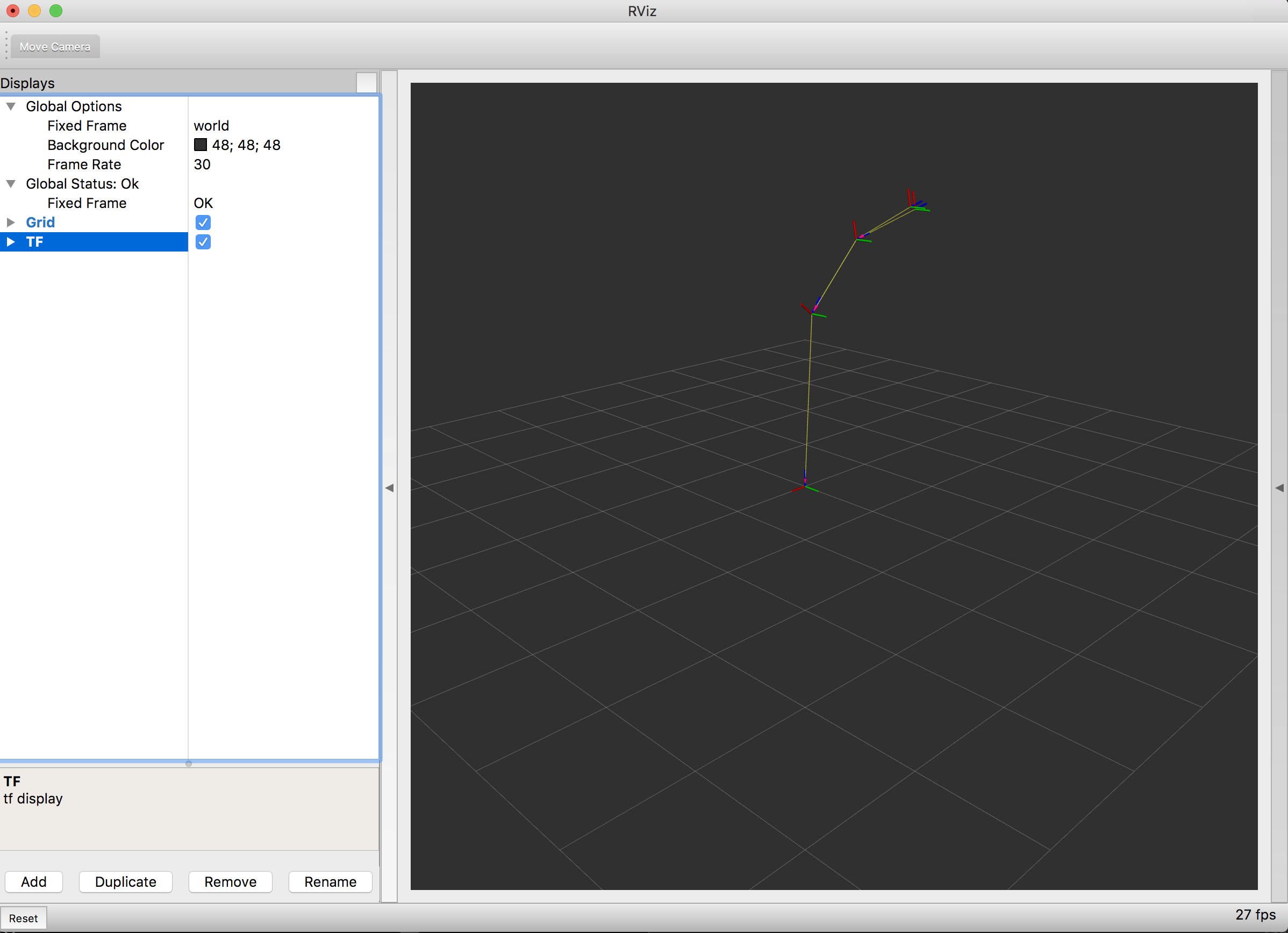
Si ahora abres en una terminal tu RViz, verás tu robot. 🎉
$ source <ROS2_INSTALL_FOLDER>/setup.bash
$ rviz2
Esto abre RViz2. Suponiendo que todavía tienes su dummy_robot_bringup lanzado, ahora puedes agregar el complemento de pantalla TF y configurar su marco global para world. Una vez que hayas hecho eso, deberías ver una imagen similar:
¿Qué esta pasando?
Si observas más de cerca el archivo de inicio, iniciamos un par de nodos al mismo tiempo.
dummy_map_server
dummy_laser
dummy_joint_states
robot_state_publisher
Los primeros dos paquetes son relativamente simples. El dummy_map_server publica constantemente un mapa vacío con una actualización periódica. El dummy_laser hace básicamente lo mismo; publicación de escaneos láser falsos ficticios.
El nodo dummy_joint_states está publicando datos de joint states falsos. Como estamos publicando un RRbot simple con solo dos articulaciones, este nodo publica valores de joint states para estas dos articulaciones.
El robot_state_publisher está haciendo un trabajo realmente interesante. Analiza el archivo URDF dado, extrae el modelo de robot y escucha los estados de unión entrantes. Con esta información publica valores de TF para nuestro robot que visualizamos en RViz.
¡Hurra!